チルティング トライク for formula MFi2013-01-30
Motorfanは数少ないカーエンジニアリングを扱う雑誌で、毎月出るわけではないが出たら必ずチェックしている。そのMotorfanで昨年末から、架空のレギュレーション/コースで争われるレースマシンのアイデアを競うというFormula MFIという企画がスタートした。
そこで僕も応募することにして色々とアイデアを練った、その結果をここに披露したい。実はこのページが当企画へのエントリー資料でもあるのだ。
アウトライン
フォーミュラMfiのマシンのレギュレーションは次の通りとなっている。
- 排気量500ccまでの4サイクル・単気筒ガソリンエンジン1基を積み、500万円程度で製作可能な1~2人乗りマシン。
- 外からメカが見えるよう、タイヤがむき出しになったオープンホイールのマシンとする。
- タイヤサイズは自由で車輪数は3輪以上。変速機および駆動方式、サスペンションストロークは自由。
もうこれは、モーターサイクルのパワートレーンを使えと言ってるようなものと(少なくとも僕は)思った。シャシーはレーシングカートを改造するのが最も作りやすく、しかも速いと思うがそれだと面白味がないので、以前から興味があるTilting trike(傾くトライク)で行くことにした。
設計テーマ
募集要項に設計テーマを明記するようにとあるので、次の通りとした。
- 低価格化:既存のモーターサイクル(オフロード系)のパワートレーン及びスイングアーム類を利用する。
- 軽量化:後輪を1輪とすることで、デフの重量を削減する(コストも)。
- 操縦性とコーナリングスピードの向上:チルトする事で重心移動を可能にし、前2輪とする事でフロントグリップ・接地感を向上する。
前2輪チルト機構
コーナーの内側に体を傾ける事は、あらゆる動物や航空機がそうしているように理にかなっている。重心を内側に移動する事により、遠心力による外側への荷重移動を相殺できるからだ。また、円形断面のモーターサイクル用タイヤを履くことで、スリップアングルによるコーナリングフォースだけでなく、キャンバースラストによる内向力も発生する。これらにより旋回速度の向上が期待できる。
一方2輪車はしかし、不安定でシビアな乗り物である(もっとも当レギュレーションでは元々2輪車は不可だが)。転倒しないように小さなタイヤの接地面積を繊細に管理する必要があり、基本的に無理が効かない。よって低μ路や危険回避の為の急な操作など、条件が悪くなるほど益々不利になってしまう。
尚、トライクでも後ろ2輪では前後グリップバランスが後ろに方寄り過ぎ、絶対的なアンダーステア特性になるだろう。また、後軸にデフが必要となるため重量やコスト的に不利である。更には前の操舵輪は一輪なので、テレスコピックフォーク+背高フレームという2輪車の弱点を背負うことになる(詳しくは後述)。よって、前2輪&後1輪とする。
ステアリングは2輪車と同じで、車体を傾けるとキャスターアングルによって自然に舵角がつく「セルフステア」が基本。ただ、2輪車と違って転倒のリスクが小さいので、場合によっては意識的にステアリングを切る(スリップアングルを増大させてコーナリングフォースを高める)操作が有効になるかも知れない。尚、ステアリングやサスペンションの構造については夫々の項で後述する。
パッケージング/乗車姿勢
最初はフォーミュラカーと同様のレイアウト即ち;ドライバーが寝そべって座り、その後ろにエンジンを置く事を考えたが、これには次のような欠点が予想される。
- モーターサイクルのエンジン->スイングアーム->ホイール間の距離は長いので、ドライバーの後ろからスタートすると長大なマシンになってしまう。
- ドライバーが座席に固定されていると、自らが動いて前後左右へ荷重を移動できない。また、直線で状態を伏せて空気抵抗を減らす事が出来ない。
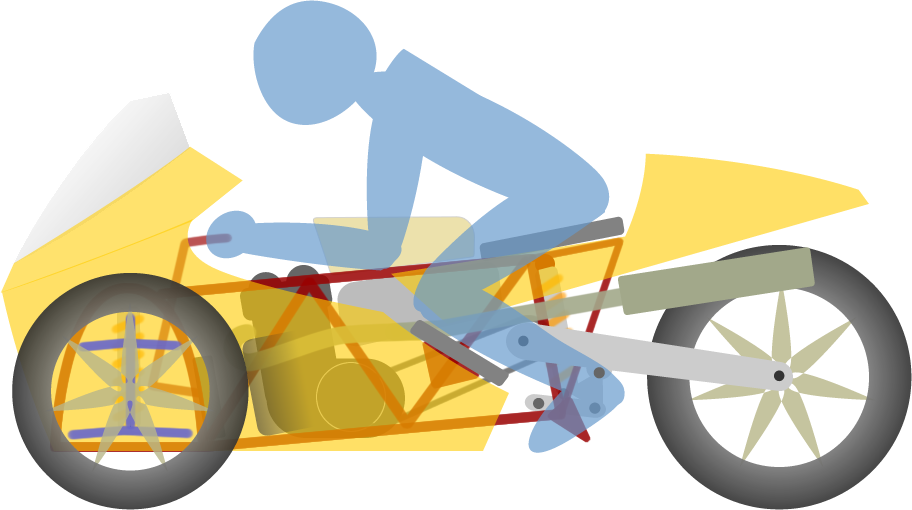
従って、モーターサイクルを全体に低くしたようなレイアウトにした(右図)。ハンドルバーやブレーキ、スロットルなどの操作系もモーターサイクルと同じ。
ドライバー(ライダー)はシートに固定されないので、クラッシュ時にはマシンと分離することが前提。よってロールバーは無く、ドライバーはレーシングスーツではなく革ツナギを着用する。
フレームは生産台数が少ないレース車両であることから、型投資がなく試作もしやすい鋼管フレームとする(既製のアルミパイプを用いても良い)。但し、サスペンションアームやプッシュロッドについては、予算が許せばワンオフのCFRPでも良い。
全体重量としては、4スト450cc単気筒のモトクロッサーが120kg以下ということを考えると、このトライクはフレーム素材的に重いことを考慮しても150kg以内に抑えたい。よって全長はモトクロッサーと同程度(ホイールが小さい分ホイールベースはやや長い)にまとめる必要があるだろう。
2輪車との違い
2輪車の前輪は操舵やストロークの際のクリアランスを確保するために、高い位置からフォークを伸ばして支持しなければならない。このためフォークは剛性を確保するために長く重くなる。またフレームもヘッドチューブ-スイングアームピボット-シートサブフレームと、全体が大きなVの字のようになる。
一方、トライクの場合は車体と前輪との干渉を気にする必要はなく、フレームを低くコンパクトに作ることが出来る。勿論、重いフォークも必要ない。よってトータル重量は、ホイール、タイヤ、サスペンション系、ブレーキ系などが1個分多いもの、2輪車に対して15-20kgの重量増ですむと想像する(但しフレーム素材が同一の場合)。
サスペンションに関しては、一般的なテレスコピックフォークは減速時や操舵時に曲げモーメントを受けるため、ストロークの際の摺動抵抗となる。一方トライクなら、ダブルウィッシュボーン式にすれば、操舵と懸架は完全に独立した機構が受け持つので動作がスムーズである。
レイアウト的には、エンジンは前輪との干渉を気にせずに前よりに搭載することが出来る。但し、エンジンスプロケットからリアスプロケットまで直接チェーンを渡す事はできないので、スイングアームピポット上に中間スプロケットを設けてこれで中継する。
当然ライダーの着座位置も低くなる。上体の前傾度は2輪のロードレーサーと同程度だが、リーン時のステップや足と地面とのクリアランスを確保するために膝の曲がりはよりきつくなるだろう(土下座姿勢)。よってデスクワークで使うバランスチェアのように、すねの部分にもパッドを装備することも考えられる。
2輪車の運動力学からすれば、マシン・ライダー共に重心が低いと言うことは、コーナリングフォースの元である重心移動が充分に得られない可能性がある。従って、車体の重心高さやライダーの着座位置を最適化すると同時に、ライダーが適宜上体を起こして重心位置を調整できるよう、ハンドルとの距離に余裕をもたせる必要がある。
これを踏まえた上で、操縦性に関するチルティングトライクの利点は前輪のグリップ力に余裕がある事だろう。やや小型ながら2本のタイヤを持つ上に、仮に両方のグリップが限界を超えたとしても、2輪車のように転倒することがない(アンダーステアになるだけ)。
よって、この余裕のある前輪グリップを生かすため、前後重量配分を前よりにして(上述のようにレイアウト的にそれが容易い)にするのが有効と考える。2輪車はライダーの好みにもよるが、基本的に前輪の接地感がないと速くは走れない。その点、チルティングトライクは元々絶大なフロントの安定感を持っている。
サスペンション
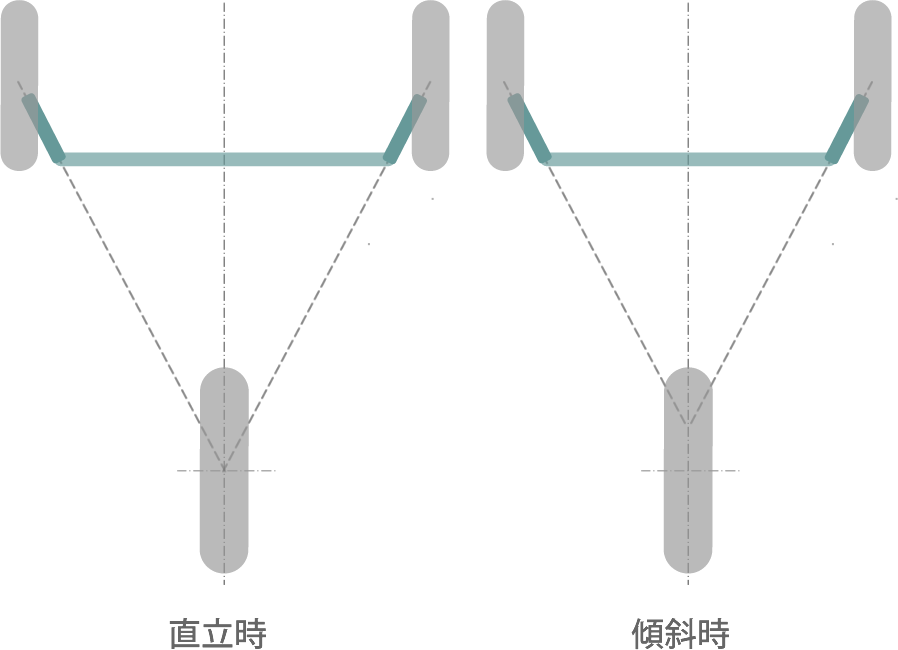
4輪車のサスペンション設計では、ロールセンターの位置を上げてロールを抑えたりするが、チルティングトライクでは逆にロールしないと困る(方向は逆だが)。また、リアのロールセンターは2輪車と同じでタイヤの接地点なので、フロントのロールセンターもそれと同じかやや下あたりが好ましい。
その為には、ダブルウィッシュボーン形式で上下のアームを平行・等長にすれば良い。理由はロールセンターの求め方に従い「平行アームは無限遠で交差しそこからタイヤの接地点に線を伸ばすと・・・」とやっても説明できるが、車体前部が前輪とアームとで常に平行四辺形を作る事に着目すれば、ロールセンターが地上の中央なのは明らか。
もっとも、実際のコーナリングでは前輪に舵角がつくのでもっと複雑なジオメトリになるが、話を簡単にするためここではステアリングは常に真っ直ぐとする。
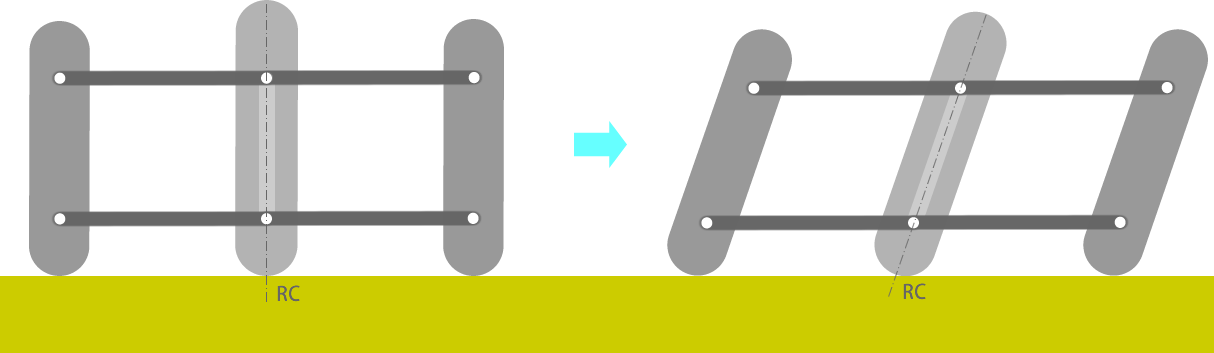
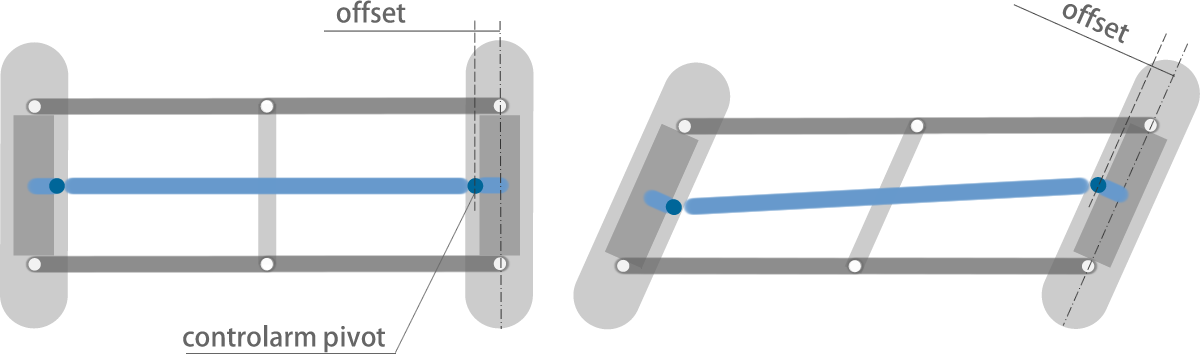
ただ、同じ平行リンクであっても、下図のようにアームの車体側取り付け位置が左右で離れていると(4輪車ではこれが普通)、傾いた時にロールセンターがコーナー外側に著しく移動してしまう。これを避けるため、上図のように左右のアーム取り付け位置は同軸にすべきだ(構造的にも可能だと思う)。
懸架とチルトの両立
実際には上図のままだと無抵抗にフルボトムしてしまうので、次にスプリングやダンパーの配置を考える。そこでもし、普通の4輪車のダブルウィッシュボーンサスと同じようにしたら、たとえアンチロールバーが無くてもライダーの体重移動では殆ど傾かないだろうし、たとえ傾いても直ぐに戻ってしまう。
そもそも車体が傾くと言うことは、車体を基準にすると一方のサスが伸びたら、その分もう一方のサスは縮むという事だ(カントの付いた路面を直立して走っているのと同じ)。従って4輪車のアンチロールバーとは逆で、左右のサスの位相差を増大させる機構を組み込めば良い。
例えば井戸のつるべと桶のように、左右の車輪をワイヤーで繋いで中央で滑車に掛けるような方式でもよい。これで一方が下がればもう一方は引っ張られて上がる。しかし、そのままだと左右同時に圧縮しないので、ワイヤーの途中をスプリングで繋いで全体が伸び縮み出来るようにすればよい(例:クルマ未来博のケイズ技研)。ただこの方式の難点は、サスが激しい動きをした時にワイヤーが緩んでしまう可能性があること。
あるいはもっとシンプルに、左右のアームを剛結して上下2本のシーソーのようにしたら、上の平行四辺形を全く崩さずに傾ける事ができる。懸架機構としては、ショックユニットをアームの外側、つまりホイールの直ぐ側に付ける(例:ピアジオMP3)。しかし、この方式はMP3くらいトレッドが狭ければともかく、シーソーアームの中央(支点)で大きな曲げモーメントが発生するためかなり太く重いアームになってしまう。
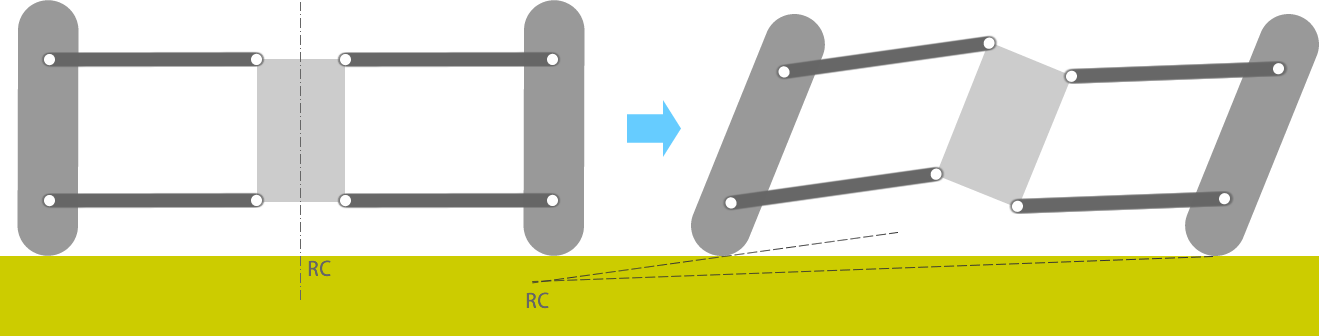
そこで私が考えたのは下図のようなシステムである(と言ってもこれに似たものは既にあったが)。一見フォーミラカーのプッシュロッド式に似ているが、左右のダンパーユニットを載せいている台座がロアアームの車体側ピポットを中心に回転するようになっている。
こうすると、車体が傾いてもダンパー台座やプッシュロッド(図の青い部分)は地面に対して殆ど動かず、形状も変わらない(ダンパーユニットはストロークしない)。つまり、サスペンションからの抵抗を全く受けずに車体を傾けることが出来る。路面からの入力や前後荷重移動があった場合のみ、左右ロアアームの位置関係が崩れロッドがリンクを介してダンパーユニットを圧縮する。
このサスペンションをSketchy physicsという物理モデルソフトでシミュレートした結果が下の動画。この場合、キングピンオフセットがあるので全体がリーンと逆方向に傾斜してしまうが、サスペンション自体は全くストロークしていない事が判る。
ステアリングシステム
上述のようにチルティングトライクはセルフステアが基本だが、ライダーが意識的に操舵出来る仕組みも必要だ(2輪車と同じ)。
最も単純な発想としては、左右の操舵輪は全く繋げずに左右の腕で独立して操舵するというもの。この方式だと構造的にシンプルでダイレクトな上に、必要なら左右の舵角を独立して最適化できる。しかしライダーの操作としては非常に複雑な為、負担が大きく操作を誤る可能性も高い。よって、前2輪トライクは4輪車と同じように操舵輪をタイロッドで連結しているのが普通だ。
その際に用いられるのが、アッカーマンジオメトリという概念だ。数学を省いて結論だけ言うと、車体鉛直方向から見てナックルアームの延長線が後車軸の中心で交わるようにすれば、操舵時に全ての車輪の軸が同じ点で交わり(つまり同じ円軌道で回り)、タイヤのサイドスリップがなくスムーズに旋回できる。
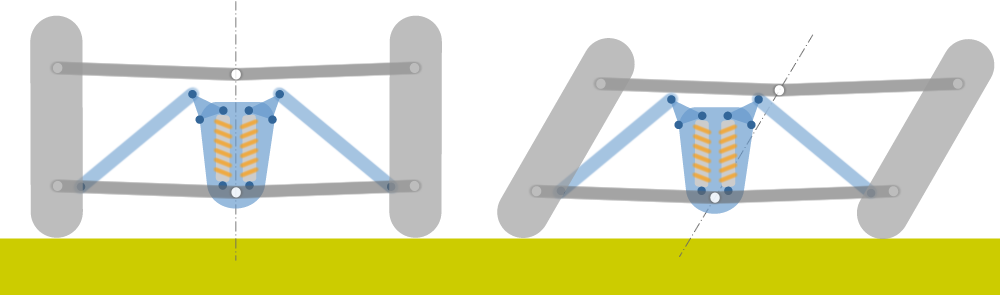
しかし、アッカーマンジオメトリをそのままチルティングトライクに適用すると、実はリーンした時に辻褄が合わなくなってしまう。なぜなら、車体が傾くということは車体から見ると左右のサスが逆方向にストロークする事だと上述したが、それはトレッドが縮まっている事を意味するからだ。
すなわち、アッカーマンジオメトリの観点からすれば、リーンすると左右のナックルアームは後輪の中心より前で交わってしまう(右図)。よって、この状態でステアリングを切ると左右輪の舵角差は理想より大きくなる、つまりトーアウト気味で走っていることになる。
更にもう一点、車体を前から見ると直立時にはタイロッドは地面に対して水平だ。しかし、ナックルアームは常にキングピン軸から垂直に伸びているので、リーンした時には左右で上下逆の方向に突き出すことになる。よって、タイロッドは水平よりややコーナー外側に向かって垂れ下がる(下図)。これは、直立時と比べてタイロッドの長さが少し足りない→ナックルアームは絞られるので、ここでも両輪の関係はトーアウト傾向になる。
本当のことを言えば、傾く乗り物の場合は車輪の旋回中心は地表より下にあり、「全車輪が同心円で旋回する」かどうかは3次元空間上で考え無くてはならない。しかし、数学的にかなりややこしそうなので4輪車と同じ2次元平面で考えるに留めた。
ただそれでも、直立時にアッカーマンジオメトリ的に最適化すると、リーン時には理想よりトーアウトになる事は判った。よってそれを見越して、ある程度バンクした状態を基準にセッティングする必要があるということだ。実際には、ナックルアームの絞りを徐々に変えながら走行テストをして妥協点を探る事になると思う。
ステアリングシステムの実際
以上は幾何学上の話だが、次は実際のステアリング構造について考える。先ず、サスペンションがストロークした時のトー変化を防止する為、サスペンションアームとタイロッドは出来る限り等長・平行が基本である。よって、上述のサス構造であれば、タイロッドは車体中心から伸びている必要がある。
その意味では、ラック・アンド・ピニオンは横幅があるので不適。しかも、車体と一緒に傾いてしまうのでタイロッドとの角度が増し、更にトーアウトになってしまう。そこで、タイロッドの車体側ピボットは車体中心とし、これとステアリングシャフトのアーム(ピットマンアーム?)とナックルアームを繋ぐ方式を採用することにした(レーシングカート方式)。
走行シミュレーション
以上の機構を組み込んだモデルを作って、走行シミュレーションを行った結果が次の動画である。ステアリングアングルとエンジン(正確にはインホイールモーター)出力をリアルタイムでコントロール出来る。
結果だが、一旦パワーを絞って旋回体制を作り、それからパワーを全開にするとスライド気味に旋回半径が小さくなるなるのは現実と同じだった。しかし、旋回がまだ始まっていない状態で全開にすると、アンダーステアを通り越して操舵と傾きとは逆の方向に旋回してしまう。これは現実の2輪車や4輪車では見たことがない挙動だ。
原因は左右の前輪の舵角が正しく付いていない事だと考え、上述のようにナックルアームの角度を絞ったり逆に緩めたりしたがあまり効果はなかった(下手をすると前輪の抵抗で停止してしまう)。また、キャスター角やキングピン角を調整してみたが殆ど変化は見られなかった。
そんな中、効果があったのはホイールベースの拡張とキングピンオフセットの拡大だった。ホイールベースを僅か1割り程度増やすと、切欠を作ってやれば全開のまま定常円旋回をするようになった。更に、キングピンオフセットをタイヤ幅の1/3程度増やすと、最初から全開でも小さな円で旋回するようになった。しかも旋回速度が速く、前輪の抵抗の少なさを伺わせる(↓)。
トライクのトラクションアンダー
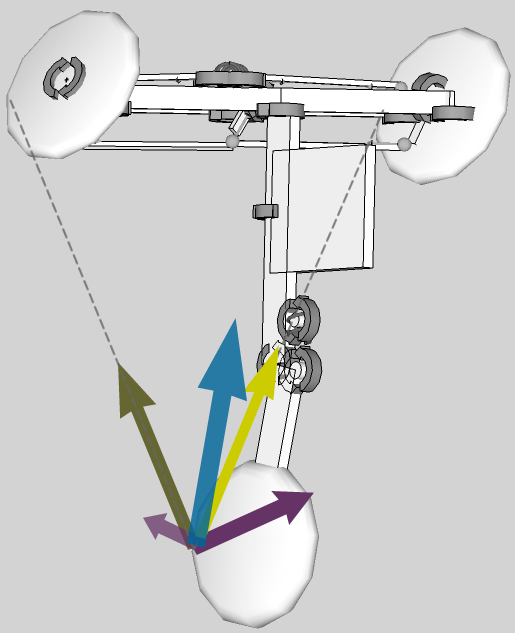
こうなるメカニズムについては次のように考えられる。右図は右に旋回中のマシンを上から見たところだが、リアタイヤが発生する力は前進方向のトラクションとキャンバースラストやスリップアングルによる内向力の合力なので、車体の前方方向よりやや内向きのベクトルになる(青い矢印)。
このベクトルは、リアタイヤの接地点から左前輪(外輪)の接地点に向かうベクトル(緑の矢印)と、それと垂直のベクトル(紫)に分割できる。これは、右前輪の接地点を中心にして紫の矢印の方向(反時計回り)に回るモーメントが働いていると言うことだ。
右前輪(内輪)についても同様にベクトルの分割ができるが(薄い緑と紫)、内輪の接地点周りのモーメント(薄い紫)は外輪のそれと比較して小さい。よって、トータルでは車体を反時計回り(旋回方向と逆)に回すモーメントが働いている事になる。そしてこの後輪による逆回転モーメントが、前輪が作り出す順回転モーメントより大きくなると逆旋回が起きると考えられる。
従って、ホイールベースを伸ばせば青と緑が作る角度が小さくなり、濃い紫のモーメントが小さくなるというわけだ。また、キングピンオフセットが増えると、外輪はより前に出て内輪はより後ろに下がる。その結果、外輪の青と緑の角度は更に小さくなった上に内輪の角度は逆に増えて益々合力としての逆回転モーメントは小さくなる。更に、傾きと逆の方向の方が急旋回したり、パワーを絞ると順旋回し始める理由もこの理論で説明できる。
因みに、トラクションアンダー(プッシングアンダー)は通常の4輪車(後輪駆動)でも起こりうるが、原因は前輪荷重の不足により充分なコーナリングフォースが得られない為とされている。しかし前2輪トライクの場合、車体中央に集中した後輪のトラクションが、コーナー外側の前輪をプッシュアウトするという意味では独特の現象と言えるだろう。
勿論、内輪と後輪の関係は逆操舵なので、コーナーの内側に巻き込むような力が働いている筈だが、上で見たように外輪で発生するモーメントより弱い。従って、上のモデルでは上手く旋回できたが、外輪への荷重移動の度合いによってはまた逆旋回が発生する可能性がある。ならばこれを逆手に取って、S時の切り返しなどで逆旋回によって先に向きを変え初め、その後車体も同方向に傾けて一気に旋回するという技も可能だろう。
MFiコースの走行シミュレーション
最後に課題のコースにおいて、同じエンジンを積む2輪/3輪(当車)/4輪車がレースをした場合、どのような差が出るか脳内でシミュレートしてみた。
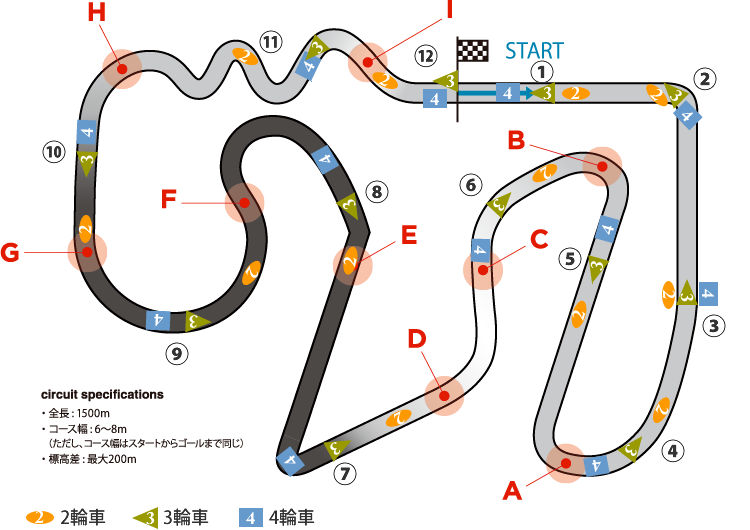
図はMFiのページからコース図を抜き取って、3車の位置関係を書き込んだものである。では、コース上の数字を割り振ったポイント順に見ていこう。
- スタートでは重量が軽い順に、2輪、3輪、4輪の順にリードする。
- 直後の直角コーナーはグリップ力に勝る4輪が挽回し、コーナー出口では順位が反転する。
- 次の直線では、加速力に勝る2輪が挽回し最終的には横一線に並ぶ。
- しかし複合コーナーの進入では、ブレーキングしながら旋回できる4輪がリードし、3輪も何とか続く。
- 続く直線で、2輪と3輪が多少挽回するものの順位は変わらず。
- タイトコーナFで更に差が開き、浅いS字のC-D区間でも殆ど挽回できず。
- 続く最もタイトなコーナーで更に4輪が差を広げ、コース中で最もタイム差が広がる。
- 続く直線と鈍角「カクン」コーナーで幅の狭さを利用して2輪が追い上げるが、同順位のまま大S字に進入。
- Fの切り返しで3輪が逆旋回モーションを使い、アンダーステアに苦しむ4輪を追い上げる。定常円旋回中は何も出来ない2輪は益々遅れる
- 短い直線部分で3輪が4輪にほぼ並びかけるが、そのままHコーナーに進入。
- 続くジグザグクランクでは3輪がテールツーノーズで4輪にアタックするが抜きどころがない。しかしインを締めすぎた4輪が立ち上がりで大きくはらんだ隙に3輪が前に出て、そのままの順位でゴールイン!
という訳で、トライクにとっては見事にデビューウィンを飾るというハッピーエンドになった。但し「このレースのフィクションであり、実在の人物やマシンとは関係ありません」と一応断っておこう。
ただ、同じパワートレーンを使う限り、2>3>4輪の順番に加速で有利になるのは確かだろう。一方、ブレーキングやコーナリングについては逆の順位になる筈。ただし、ダウンフォースを使わない限り4輪車が圧倒的に優位とはならないと思う。
雑感
振り返るとユニークなアイデアというより、チルティングトライクの基礎理論みたいな話になってしまった。マシンは本当に試作するつもりで、作りやすさや既存のパーツを流用する事を重視したので、コンポーネント的な新しさはない。
その意味では当企画の趣旨からズレてしまったかもしれないが、チルティングトライク自体が新しい乗り物という事でご容赦願いたい。実際ネットでメカニズムに関する資料を探したが殆ど見当たらず、世界的にもマイナーなジャンルのようだ。ましてやレーサーとして速さを競うとなると、どういう構造が良いのか又どういう乗り方をすべきなのか未知の世界なのだと思う。
追記:雑誌記事の補足と裏話
4/15発売のレーシングカーのエアロダイナミクスという号に、遂に僕の作品が載った。良かったら書店でチェックしてくだされ。と言っても、内容はMFiのサイトでもそのものずばりが見れるけどね。
幾つか補足しておくと、先ずこのマシンに名前を付けてくれと言われたので、T-TrikeRという名前を付けた。意味はTilting Trike Racerで「ティー・トライカー」と読む。どっかで聞いたことが有るような名前だが、何でも頭に”i”を付ける大企業よりマシという事でご容赦願いたい。
次に僕のプロフィール写真だが、顔は小さくて分かりづらいがバイクの車種はわかると思う。このサイトの読者ならご存知かと思うが、これは僕のバイクではない。実は自分のバイクと一緒に撮った写真が皆無なので、顔だけの写真やモーターショーでRCVに跨って撮ってもらった写真を候補として編集部に出した。黄色いBMWは僕のバイクじゃないけど良いのかと問うたが、「バイク乗りと判るほうが良い」と言われてこの写真を使うことになった。
さて、記事の内容だが、予想通りかなリ編集されている。見開き2ページって意外と情報量が限られており、しかもそのうち半分弱は編集部と国政氏のコメントで、さらに僕のコンテンツの大半は画像だ。残る非常に限られた文字数の中で良くまとめたなとは思うが、意味は読者に伝わっただろうか?
紙媒体の特性上伝えきれない部分があるのは仕方ないので、「詳しくはWebで」と当ページのURLを載せた方が読者には親切なのではないか?と言ったのだが、編集部の方針でNGらしい。Webサイトの宣伝になるようなことはしないそうだ。
まあ、ぱっと見の印象としては、画像が綺麗に印刷されているので見栄えはするのではないかと。 因みにこれら画像は小さいものでも横幅が2700ピクセルも有る。印刷の解像度が360bpiもあるので、それくらい無いと荒くぼやけてしまうという。僕は殆どの画像はベクター形式で作っていたので問題なく拡大できたが、手描き的にピクセル形式だったらどうしようもなかっただろう。
文章については、印刷に出す直前に編集部から原稿が送られてきて確認するよう頼まれたが、僕が返信した時には既にタイムオーバーだった。尚、明らかな間違いは、AdivaのADTreをコンセプトモデルだと紹介しているが、本当は近々発売予定の量産車だ。もっと細いことを言えば、i-Raodははリアじゃなくフロントサスをアクチュエータでストロークさせていると思う。まあ、編集部の注記だから僕は構わないけどね。
あと、記事になって気付いたが、画像番号の割り振りがおかしい。まず「03」が2つもあるが、最初のサスペンション図は「02」だよね。また、2ページ目の「まさかの逆旋回をキングピンオフセットで解決」という部分に関連する図は04/05で、「ダンピングも2輪を踏襲したスタイル」の部分は02/03図の事を言ってるのではかなろかと。
尚、類似事例としてのADTreは僕が編集部に伝え、サスペンションの写真も僕がモーターサイクルショーで撮ったものだ。編集部から使わせて欲しいと依頼があったのでOKしたが、「足立氏撮影」とも何とも書いてないので、編集部が取材したように見えるのでは?逆に考えると、この雑誌にある他の写真も実は人から借りてきたものが多かったりして。
とまあ、僕はこんな調子で色々と突っ込んだり、持論を展開し編集部の前例に素直に従わないので(^^ゞ、「五月蝿いやつだ」と思われたに違いない。でも、こうして完成すると嬉しいしホッとする。編集部の方も僕との多量のメールのやり取りや、東京での打ち合わせ、そして原稿起こしとお疲れ様でした。